
2017年 | プレスリリース・研究成果
世界初、速度に応じて自発的に足並みを変える四脚ロボット-四脚動物が巧みに足並みを変化させ効率よく移動するからくりの解明へ
東北大学電気通信研究所の石黒章夫教授、大脇大助教の研究グループは、四脚動物が移動速度に応じて足並みを自発的に変化させる現象(歩容遷移現象)を、四脚ロボットで再現することに世界で初めて成功しました。
これまで、どのように四脚動物が移動速度に応じて自発的に足並みを変化させるか、についての制御メカニズムは明らかではありませんでした。本研究では、「脚に荷重がかかっているときは,そのまま身体を支え続けようとする」という、きわめてシンプルな制御則をそれぞれの脚が実行するだけで、歩容遷移現象を生み出すことに成功しました。さらに、四脚ロボットにより再現された足並みは、エネルギー効率に優れたものであり、ウマなどから得られた特性とよく一致することがわかりました。この成果は、四脚動物が足並みを自発的に変化させることで効率よく移動する仕組みや、動物が身体に有する多くの自由度をどのようにして巧みに操っているかの解明に資すると考えられます。また、この成果を発展させることで、四脚動物に比肩しうる運動能力を有するロボットの工学的実現のための基盤技術となることも期待できます。
本研究成果は、2017年3月21日(日本時間3月21日19時)に英国の科学誌Scientific Reports電子版に掲載されました。
A 開発した四脚ロボットOscillex 3
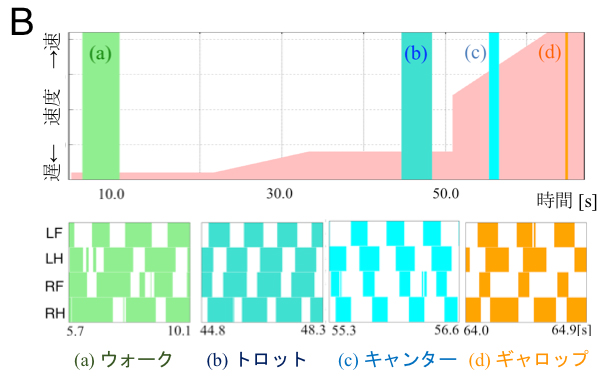
B 再現された足並みの変化(歩容遷移現象)
問い合わせ先
(研究に関すること)
東北大学電気通信研究所
教授 石黒章夫
TEL:022-217-5464
E-mail:ishiguro*tohoku.ac.jp(*を@に置き換えてください)
(報道に関すること)
東北大学電気通信研究所総務係
TEL:022-217-5420 FAX:022-217-5426
E-mail: somu*riec.tohoku.ac.jp(*を@に置き換えてください)