
2016年 | プレスリリース・研究成果
被災環境下での捜索・状況確認活動を支援する画像認識システム
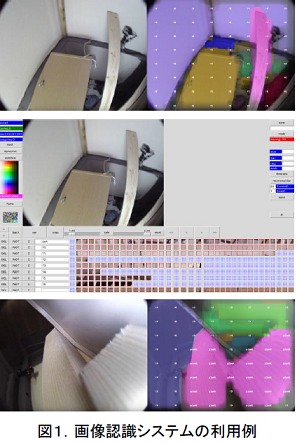
ImPACTタフ・ロボティクス・チャレンジによるロボットインテリジェンス・極限画像処理
内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所 諭)の一環として、信州大学 山崎 公俊(やまざき きみとし)助教、アーノード・ソービ研究員、東北大学 田所 諭(たどころ さとし)教授のグループは、被災地での捜索活動などに用いる遠隔操作ロボットで撮影した画像から、周囲に存在するものの種別や探索対象の発見を支援するための画像認識システムの開発に成功しました。本システムは、ヘビ型ロボット、サイバー救助犬、ヒューマノイドロボットなど、災害環境で作業をおこなう様々なタイプのロボットへ搭載可能です。
本成果の一部は、2016年9月7~9日に開催される第34回日本ロボット学会学術講演会にて発表いたします。
問い合わせ先
<画像認識システムに関すること>
東北大学大学院情報科学研究科
教授 田所 諭(たどころ さとし)
TEL:022-795-7025
E-mail:staff*rm.is.tohoku.ac.jp(*を@に置き換えてください)