2018年 | プレスリリース・研究成果
刃物のようにとがった物体でもつかめる柔軟ロボットハンドを開発
【要点】
- とがった複雑形状の物体でもつかめる柔軟ロボットハンドを開発
- 防刃生地を利用し「耐切創性・耐久性」と「柔軟性」を両立
- どんな形でも容易につかめるため、災害現場での瓦礫把持はもとより、工場での作業効率化・生産性向上にも有効
【概要】
内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所諭)の一環として、東北大学の多田隈建二郎准教授、田所諭教授、昆陽雅司准教授、藤田政宏博士後期課程学生らのグループは、とがった物体、複雑形状物や脆弱物体など、多様な物体をつかめるロボットハンドを新規に開発しました。
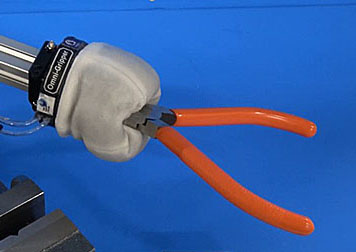
とがった物や柔らかい物でも、包み込むことにより容易に把持することができます。ハンドの袋の素材として柔軟な防刃生地を利用することで耐切創性・耐久性と柔軟性を両立し、つかむ対象はもとよりハンド自身を傷つけることなく作業を行うことができます。
これまでの袋状のロボットハンドは、さまざまな形状の物体をつかむことができましたが、とがった物体では袋が破損し、壊れてしまい、耐久性に課題がありました。この成果により、つかめる対象物の範囲が飛躍的に拡大されるため、災害復旧や工場での作業の効率化・迅速化に大きく寄与すると期待されます。
問い合わせ先
<研究開発に関すること>
多田隈 建二郎(ただくま けんじろう)
東北大学 大学院情報科学研究科 応用情報科学専攻 准教授
〒980-8579 宮城県仙台市青葉区荒巻字6-6-1 工学部機械知能系共同棟4階
Tel: 022-795-7025
E-mail: tadakuma*rm.is.tohoku.ac.jp (*を@に置き換えてください)
田所 諭(たどころ さとし)
東北大学 大学院情報科学研究科 教授
〒980-8579 宮城県仙台市青葉区荒巻字6-6-1 工学部機械知能系共同棟4階
Tel: 022-795-7022
E-mail: tadokoro*rm.is.tohoku.ac.jp (*を@に置き換えてください)
<報道担当>
東北大学 大学院情報科学研究科 広報室
〒980-8579 宮城県仙台市青葉区荒巻字青葉6-3-9
Tel: 022-795-4529 Fax: 022-795-5815
E-mail: koho*is.tohoku.ac.jp (*を@に置き換えてください)