2021年 | プレスリリース・研究成果
ソフトロボットの運動再現性を向上 ― 反復学習型ニューラルネットワークにより高い制御精度を実現 ―
【本学研究者情報】
〇大学院工学研究科 教授 林部充宏
研究室ウェブサイト
【発表のポイント】
-
ソフトアクチュエータ注1の動的変形特性の個体差を補償し、高い制御精度と運動再現性を実現
-
応答遅れの大きいソフトアクチュエータに対する反復学習制御でニューラルネットワークを生成
- 学習に使用された訓練データとは異なる新しい軌道に対しても追従制御を達成する一般化学習に成功
【概要】
人工筋肉などの分野でソフトアクチュエータが注目されています。しかし、精確な制御が難しいという特徴があり、特に、ソフトアクチュエータをシリコン素材から手作業で制作する際に発生する材料変形特性の個体差は制御性能の低下を招き、入力が同じでも微妙に異なる変形結果となることが知られています。先行研究ではこのような問題に対しフィードバック制御などが採用されてきましたが、応答の時間遅れが大きいソフトアクチュエータに対する応用は難しいという課題がありました。東北大学工学研究科の杉山拓氏(博士前期課程2年)、林部充宏教授らの研究グループは、そのような応答遅れの大きいソフトアクチュエータに対するフィードフォワード学習制御手法を提案しました。反復学習制御とニューラルネットワークを組み合わせた学習制御手法を用いることで、ソフトアクチュエータの動的変形特性を考慮した個体差補償と一般化された軌道に対する高い制御精度を実現しました。この成果は、ソフトロボットの欠点を補い課題であった運動再現性の確保につながり、その実用化への貢献が期待できます。
本成果は、2021年11月2日付で学術誌「Bioinspiration & Biomimetics」に掲載されました。
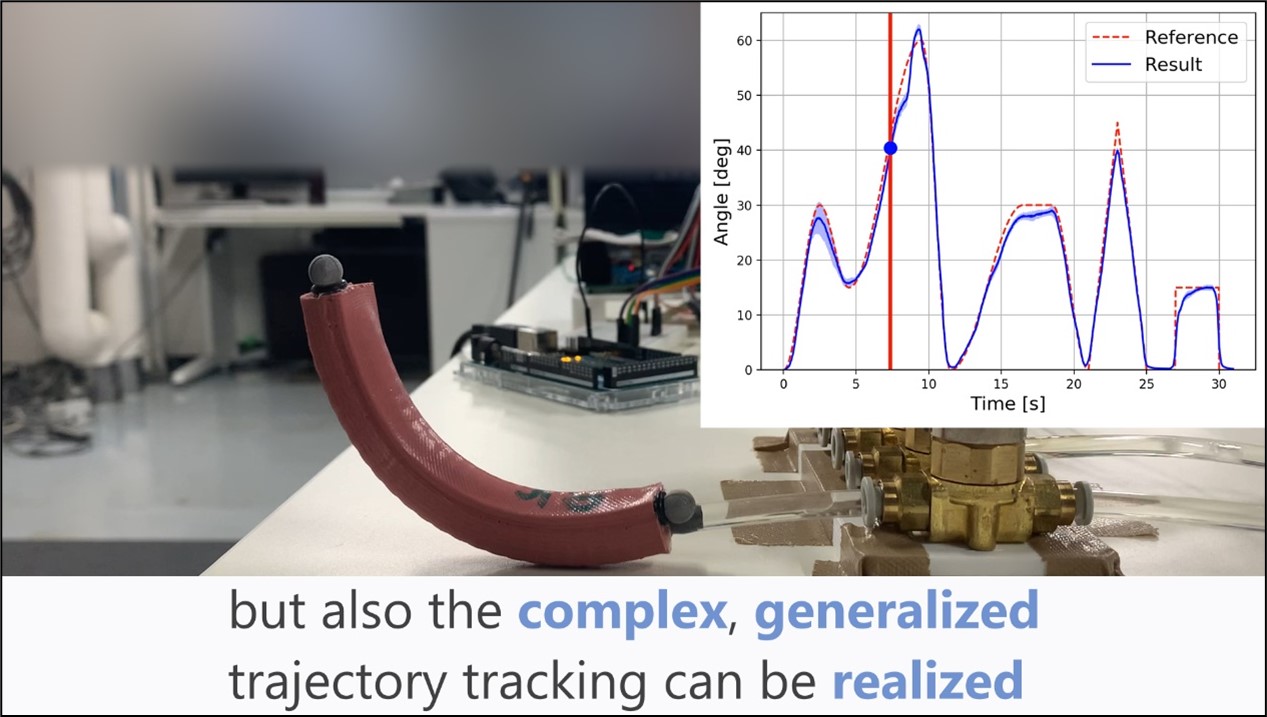
ソフトアクチュエータが学習後新しい軌道に対して追従している様子
【用語解説】
注1. ソフトアクチュエータ:機械を動かすための駆動源のことをアクチュエータといい、ソフトアクチュエータは従来の電気モーターを利用した動力源とは異なり、材料そのものが変形する性質を利用した動力源かつ駆動源であるという特徴がある。
問い合わせ先
< 研究に関して >
東北大学大学院工学研究科 ロボティクス専攻
教授 林部 充宏
電話 022-795- 6970
E-mail: mitsuhiro.hayashibe.e6*tohoku.ac.jp
(*を@に置き換えてください)
< 報道に関して >
東北大学工学研究科情報広報室 担当 沼澤 みどり
TEL: 022-795-5898
E-mail: eng-pr*grp.tohoku.ac.jp
(*を@に置き換えてください)
![]()
![]()
![]()
東北大学は持続可能な開発目標(SDGs)を支援しています