2021年 | プレスリリース・研究成果
深層学習を用いたSLAM処理を大幅に高速化 画像認識による高度な自律制御をエッジデバイスで実現可能に
【本学研究者情報】
〇情報科学研究科 システム情報科学専攻 知能ロボティクス学分野 教授 岡谷貴之
研究室ウェブサイト
【概要】
株式会社ソシオネクスト (Socionext Inc.) は、東北大学大学院情報科学研究科システム情報科学専攻 岡谷 貴之教授の研究グループと共同で、自律制御を行う装置に必須のSLAM (Simultaneous Localization and Mapping、 自己位置推定と環境地図作成) 処理に必要な時間を従来技術の約1/60にまで削減できる新しい手法を開発しました。本手法により、CPUの消費電力・性能に制約のあるエッジ向けのSoCでも高度なSLAM処理が可能となり、自動運転車をはじめ、産業向けの無人搬送車(AGV)、ロボット、ドローンなど自律走行・自律制御を行う装置、さらにAR (拡張現実) グラスといったデバイスへの応用が期待されます。今回の研究成果はコンピュータビジョン分野で最も権威のある学会のひとつである「ICCV」に口頭発表論文として採択されました。
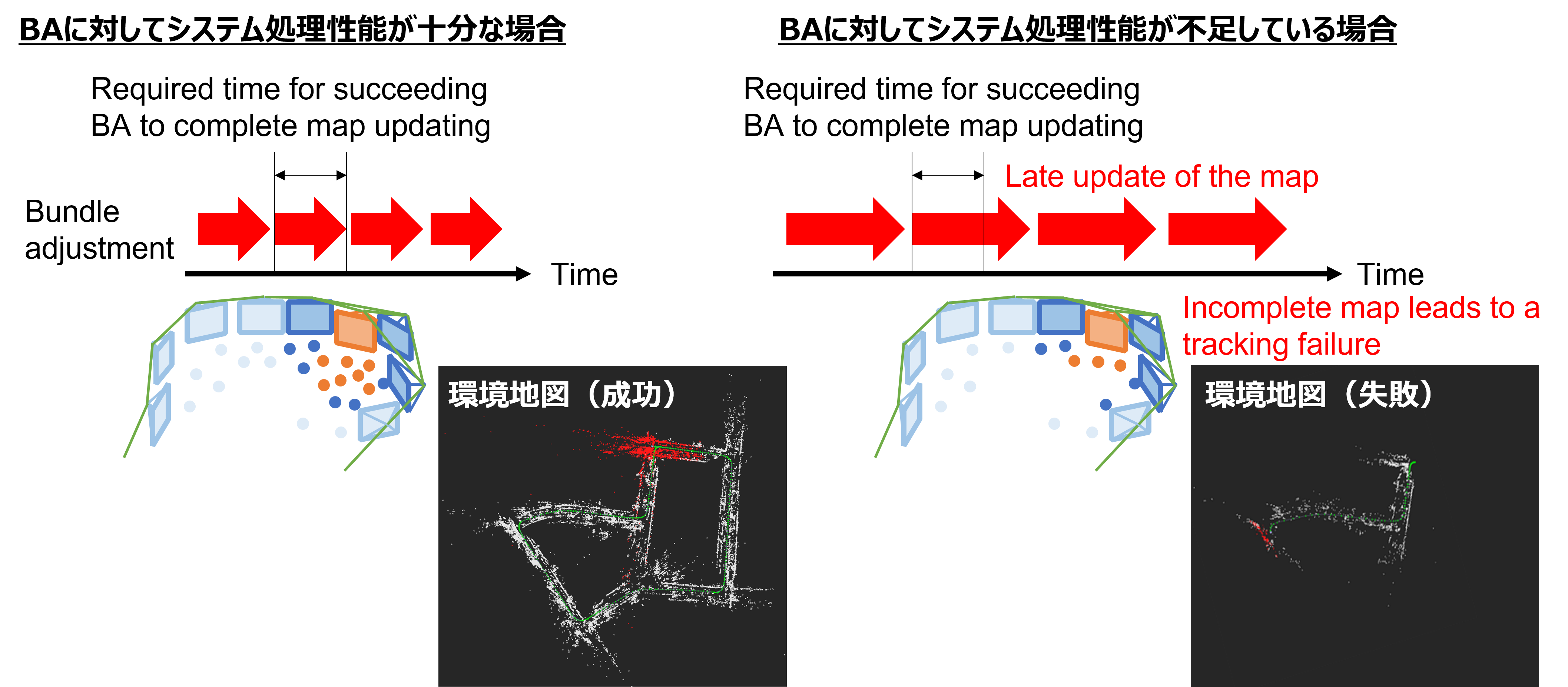
図1
問い合わせ先
東北大学 大学院情報科学研究科
広報室 佐藤
電話:(022)-795-4529
E-mail: koho*is.tohoku.ac.jp
(*を@に置き換えてください)