2023年 | プレスリリース・研究成果
ミミズ団子のほふく前進 〜デコボコ地面を味方につけた変幻自在のうじゃうじゃ集合体〜
【本学研究者情報】
〇電気通信研究所 准教授 加納剛史
ウェブサイト
【発表のポイント】
- 絡まり合って塊を形成するイトミミズの群れが地面の凹凸を利用して移動することを発見しました。
- 「絡みつき」を表現した数理モデルを構築し、シミュレーションで振る舞いを再現しました。
- たくさんの「やわらかい」ロボットが協調して変幻自在に機能を発揮する、新しい工学システムの実現につながると期待されます。
【概要】
太さ0.3 mm、長さ10−40mm程度の小さなミミズであるイトミミズは、しばしばその柔軟な身体をくねらせ、たくさんの個体が互いに絡まり合って団子のような塊(かたまり)を形成します。このイトミミズの塊は、あたかも一つの生き物であるかのように、状況に応じて形を変えながら動き回ります。
東北大学電気通信研究所の加納剛史准教授、大学院博士課程の三上大志氏(研究当時)、脇田大輝特任助教、石黒章夫教授、広島大学の小林亮名誉教授(元広島大学大学院統合生命科学研究科)の研究グループは、行動観察実験、数理モデリング注1、シミュレーションを通して、イトミミズの塊注2が地面の凹凸を利用して移動するしくみを世界で初めて明らかにしました。
この成果は、動物の群れが複雑なデコボコした自然界で動き回るしくみの理解のみならず、たくさんの「やわらかい」ロボットが協調して変幻自在に機能を発揮する、新しい工学システムの実現につながると期待されます。
本研究成果は、2023年8月29日(日本時間15時)に科学誌Frontiers in Neurorobotics電子版に掲載されました。
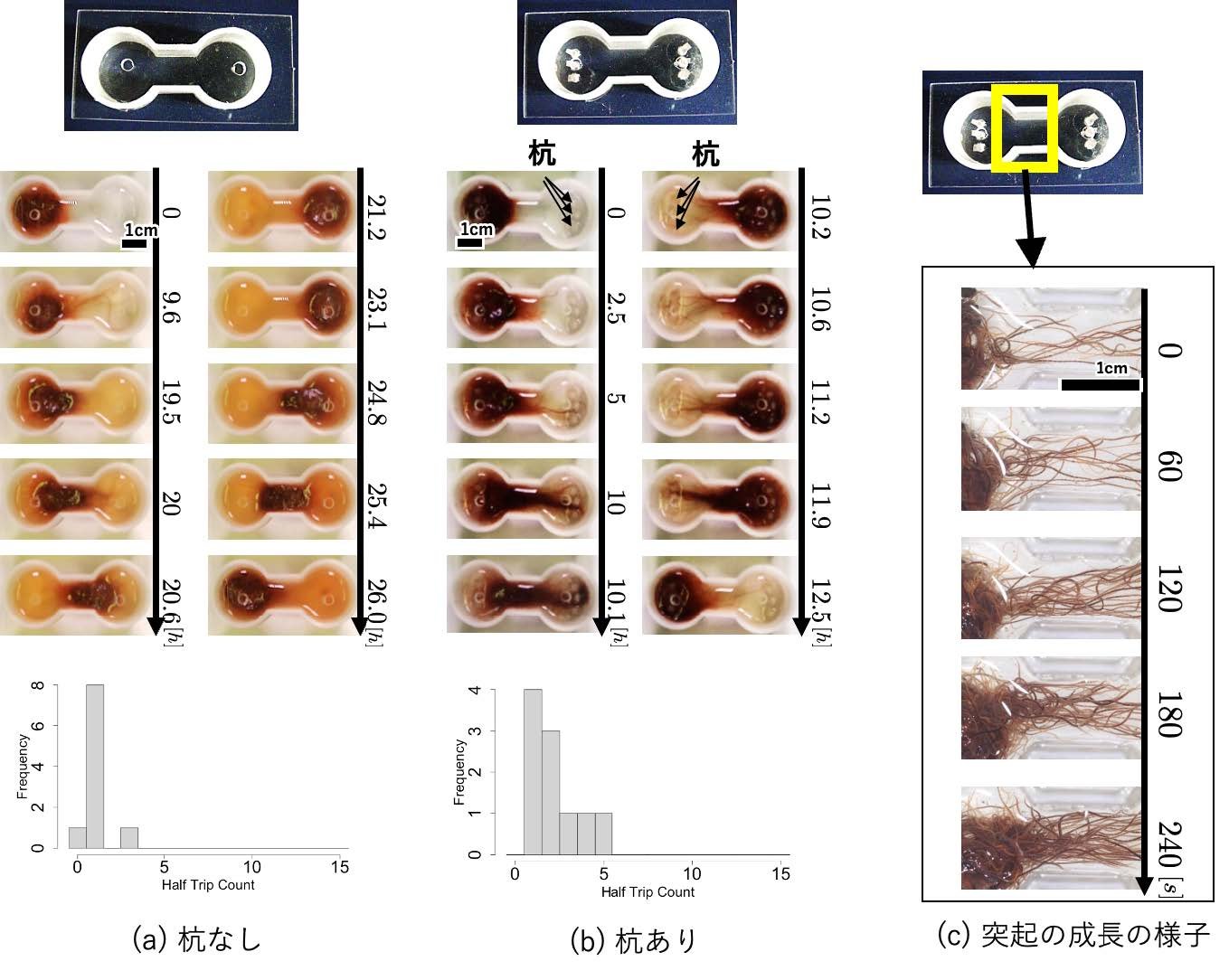
図1. (a)杭なし、(b)杭ありの鉄アレイ型のケースにイトミミズの塊を入れ、1試行あたり66時間、10試行観察した。左下のグラフは、 1試行あたりに片道移動した回数を示しており、杭ありのほうが多く移動していることがわかる。(c)は突起の成長の様子を示す。
【用語解説】
注1. 数理モデリング:現象のしくみを理解するために、現象を数式で表すこと。
注2. イトミミズの塊:正確には、本研究の実験で使用したイトミミズの塊は、イトミミズ亜科に属するユリミミズ、ウィリーユリミミズが大多数を占める複数種で構成されている。
【動画】
動画1:イトミミズの塊の形成過程(動画前半)。嫌な刺激であるカラシから塊が逃げる様子(動画後半)。
動画4:シミュレーション結果(図3)。動画の左側が杭なし、右側が杭あり。
問い合わせ先
(研究に関すること)
東北大学電気通信研究所
准教授 加納剛史
TEL: 022-217-5465
E-mail: tkano*riec.tohoku.ac.jp
(報道に関すること)
東北大学電気通信研究所総務係
TEL: 022-217-5420
E-mail: riec-somu*grp.tohoku.ac.jp(*を@に置き換えてください)
![]()
![]()
東北大学は持続可能な開発目標(SDGs)を支援しています