2022年 | プレスリリース・研究成果
未知のエネルギー散逸系の動的平衡状態を分散した積分器で誘導 ― 適応的な同期振動現象の解明に寄与 ―
【本学研究者情報】
〇大学院工学研究科 ロボティクス専攻
教授 林部充宏
研究室ウェブサイト
【発表のポイント】
- 未知のエネルギー散逸注1系の動的平衡の同期振動状態を分散した積分器で誘導できることを実証
- 既往の結合振動子注2による振動子間の調整機構がなくても、環境適応性注3を有した同期振動現象が発現されることを確認
- 生体の関節運動等の適応的同期振動の誘導メカニズム解明に寄与可能
【概要】
同期現象は、多くの自然機械系に共通する現象です。生物の関節の摩擦や減衰は、エネルギー散逸につながります。エネルギー散逸系の動的平衡のためには、1サイクル中の摩擦によるエネルギー損失量とモーターからのシステム全体へのエネルギー入力量が釣り合っている必要があり、力学モデルが未知の機械力学システムや多自由度システムである場合に、どのように環境適応的に動的平衡状態を誘導できるかは自明ではない問題です。
これまでシステムの状態を用いた結合振動子等により振動入力の調整機構を用いる手法が用いられてきました。しかし振動子を用いる場合、振動子の種類の選定が事前に必要となることや、振動子系の力学自体がシステムの振る舞いに大きく影響を与えるという問題がありました。
東北大学大学院工学研究科の林部充宏教授と理化学研究所下田真吾ユニットリーダーの研究グループは、力学モデルの情報がない未知のエネルギー散逸系であっても、その動的平衡の同期振動状態を分散神経積分器により誘導できることを実証しました。
提案の手法ではトルク入力情報を用いた分散積分器のみにより、振動の位相や周波数の情報を用いなくても位相調整、振動数調整、振幅調整現象が自己組織的に起きることで動的平衡状態の誘導をもたらすことを実証しました。自然界にみられる生体の環境適応性のある同期振動現象の解明につながることが期待されます。
本成果は、2022年10月13日に、「Scientific Reports」に掲載されました。
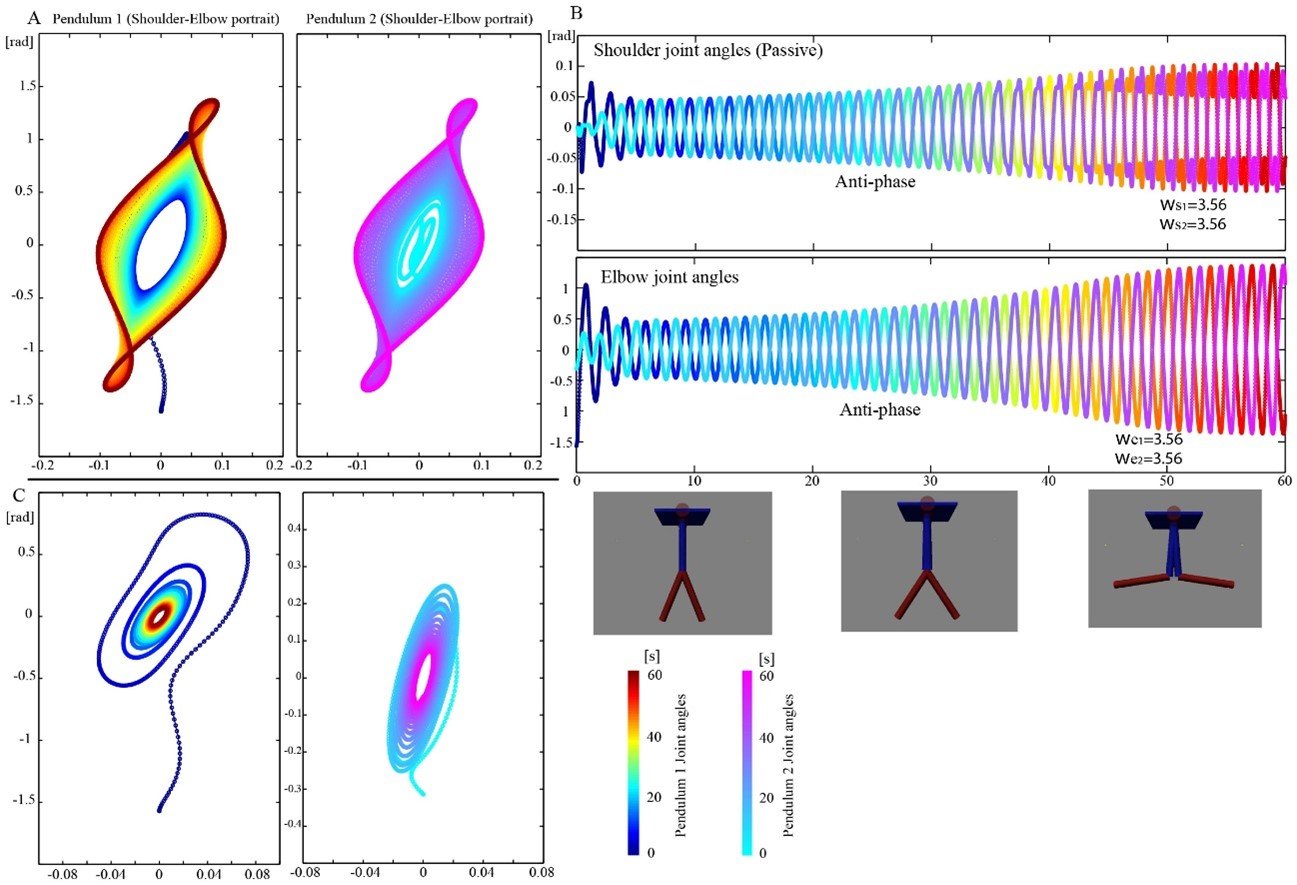
図1 提案した分散神経積分器で制御されたリミットサイクル形成の様子、共通の浮動ベースに接続された二つの二重振り子の位相図。肩関節と肘関節の角度が振り子間で逆位相に調整されながら時間変化し、最終的にシステムの固有周波数に収束する周波数調整も起きている。
【用語解説】
注1 エネルギー散逸
エネルギーが出入りする開放系では、エントロピーがより低い秩序ある相状態へ系が移行する場合がある。エネルギーの散逸に伴って発生する秩序構造を散逸構造と言う。
注2 結合振動子
微小な振動体を振動という性質にだけ着目したときに「振動子」と呼ぶ。振動現象をしめすもの(振動子)が相互に影響を及ぼしあうようなモデル。例えば隣の振動子の位相がその隣の位相に影響を及ぼすといった局所的な結合もあれば、すべての振動子に同様に影響を与える大域的な結合の様式もある。
注3 環境適応性
環境の変化に応じて行動を切り替える性質や能力を「環境適応性」あるいは「環境適応能力」と言う。
問い合わせ先
< 研究に関して >
東北大学大学院工学研究科 ロボティクス専攻
教授 林部 充宏
電話 022-795-6970
E-mail: mitsuhiro.hayashibe.e6*tohoku.ac.jp
(*を@に置き換えてください)
< 報道に関して >
東北大学工学研究科情報広報室 担当 沼澤 みどり
TEL: 022-795-5898
E-mail: eng-pr*grp.tohoku.ac.jp
(*を@に置き換えてください)
![]()
![]()
![]()
東北大学は持続可能な開発目標(SDGs)を支援しています