2023年 | プレスリリース・研究成果
運動モードを自己組織的に切り替える ニューラルネットワーク学習を実現 生物の動きを模倣できるAI開発に期待
【本学研究者情報】
〇大学院工学研究科 ロボティクス専攻
教授 林部 充宏
研究室ウェブサイト
【発表のポイント】
- 人間の身体運動をつかさどる姿勢制御モードの自動切替え機構を環境に応じて自己組織的に実行できるニューラルネットワーク(注1)を構築しました。
- 従来必要であった事前の身体力学情報が不要で、運動経験と強化学習のみにより自己組織化現象(注2)が再現可能です。
- 学習したニューラルネットワークは、連続的なタスク変化さらには未学習範囲の身体条件にも適応可能であることを実証しました。
【概要】
人間など生物は運動や環境条件に応じて自己組織的に身体の関節駆動のパターンを巧みに切替えています。人間の姿勢制御は主に足首関節と股関節の協調運動により行われています。身体の揺動が小さくバランスの余裕がある時には足首関節と股関節は同じ方向に同相で制御され、身体の揺動が大きくバランスの余裕がなくなる時には逆相で制御されていることが知られています。このような生物の自己組織的振る舞いには、常に"いつ"、"どのように"なめらかに切替えるかを自己組織的に判断することが必要とされます。そのうえ成長・加齢による身体特性の変化など様々な要因も加わるため、力学条件に応じた自動的な運動モード切替えをAIで再現することは容易ではありません。
東北大学大学院工学研究科の林部充宏教授とGuanda Li(グアンダ リ)大学院生およびKeli Shen(ケリー シェン)大学院生(研究当時)らの研究グループは、事前の身体力学モデルを想定することなく、運動周波数に着目することで力学条件に応じて運動モードを適応的に調整できるニューラルネットワークを構築することに成功しました。
本研究成果は、科学誌Scientific Reportsに2023年6月2日付けで掲載されました。
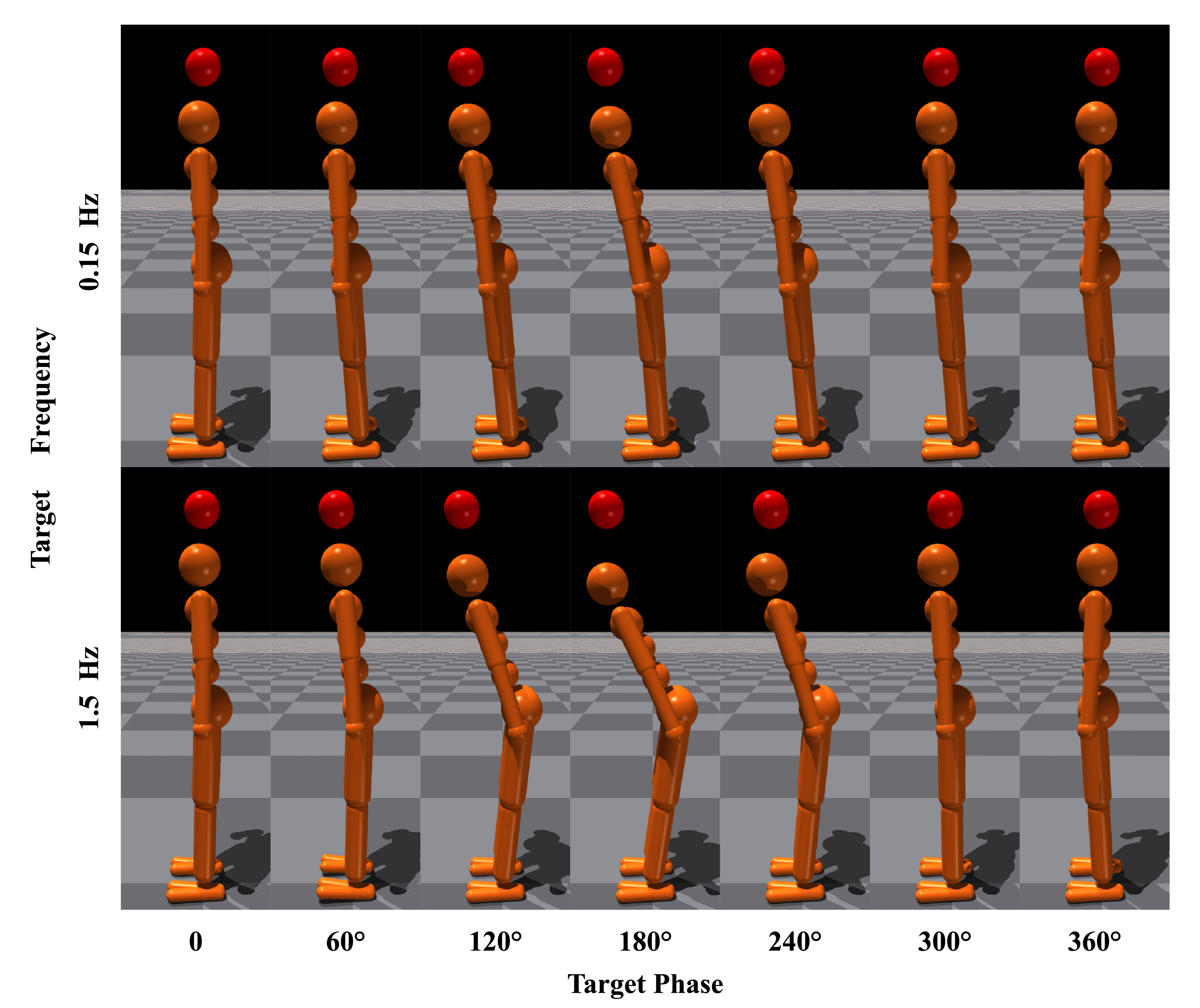
図1. 姿勢制御における頭部の前後運動タスクにおいて遅い運動速度の場合は、足首関節と股関節を同相で同じ向きに制御している様子(上段)、早い速度の場合は、逆相で逆向きに制御している様子(下段)。
【用語解説】
注1 ニューラルネットワーク
人間の脳内の神経細胞である「ニューロン」を語源とし、脳の神経回路の構造を数学的に表現した手法である。「入力を線形変換する処理単位」がネットワーク状に結合した数理モデルであり、人工知能(AI)の問題を解くために用いられる。
注2 自己組織化現象
個体が系全体を俯瞰する能力を持たないにも関わらず、個々の自律的な振る舞いの結果として、秩序を持つ大きな構造を作り出す現象のことである。
問い合わせ先
(研究に関すること)
東北大学大学院工学研究科 ロボティクス専攻
教授 林部 充宏
TEL: 022-795- 6970
E-mail: hayashibe*tohoku.ac.jp(*を@に置き換えてください)
(報道に関すること)
東北大学大学院工学研究科
情報広報室 沼澤 みどり
TEL: 022-795-5898
E-mail: eng-pr*grp.tohoku.ac.jp(*を@に置き換えてください)
![]()
![]()
東北大学は持続可能な開発目標(SDGs)を支援しています