2025年 | プレスリリース・研究成果
ウナギが水中も陸上も泳げる仕組みを数式とロボットを用いて解明 ~「伸び」と「圧」の感覚を活用した運動制御が鍵~
【本学研究者情報】
〇学際科学フロンティア研究所
助教 安井 浩太郎
研究所ウェブサイト
【発表のポイント】
- ウナギなどの細長い魚類の運動制御に関して、伸展感覚と圧力感覚の2つのフィードバックを統合した神経回路モデルを提案しました。
- 提案モデルが水中遊泳でも障害物がある陸上移動でも有効なことをシミュレーション・ロボット実験により世界で初めて実証しました。
- ウナギが脊髄損傷後も遊泳できる仕組みを説明する新たな仮説を提唱しました。
- 環境変化や身体の損傷に対してタフに動けるロボット開発への応用が期待されます。
【概要】
ウナギなどの細長い魚は、脊髄が損傷した後も泳ぐことができ、水中だけでなく陸上も移動できる優れた運動能力を持っています。東北大学学際科学フロンティア研究所の安井浩太郎助教、電気通信研究所の鈴木朱羅助教、石黒章夫教授は、公立はこだて未来大学の加納剛史教授、オタワ大学のEmily M. Standen准教授、スイス連邦工科大学ローザンヌ校のAstha Gupta大学院生、Auke J. Ijspeert教授らとの共同研究により、この驚異的な運動能力を生み出す神経回路メカニズムの解明に取り組みました。
研究グループは、身体に備わる「伸展感覚」と「圧力感覚」の二つの感覚フィードバック注1を統合した神経回路モデルを提案し、このモデルが水中遊泳と障害物がある陸上移動の両方に有効であることをシミュレーション・ロボット実験により世界で初めて実証しました。また、脊髄損傷後のウナギの遊泳能力に関する新たな仮説として、身体に分散した神経回路が自発的なリズムを生み出せるならば感覚フィードバックを活用して自然に泳ぎ続けられることを提唱しました。本研究成果は、動物の運動制御の原理解明に貢献するとともに、タフに動くロボットの開発への応用が期待されます。
本研究成果は、学術誌Proceedings of the National Academy of Sciences of the United States of America に2025年8月18日付けで掲載されました。
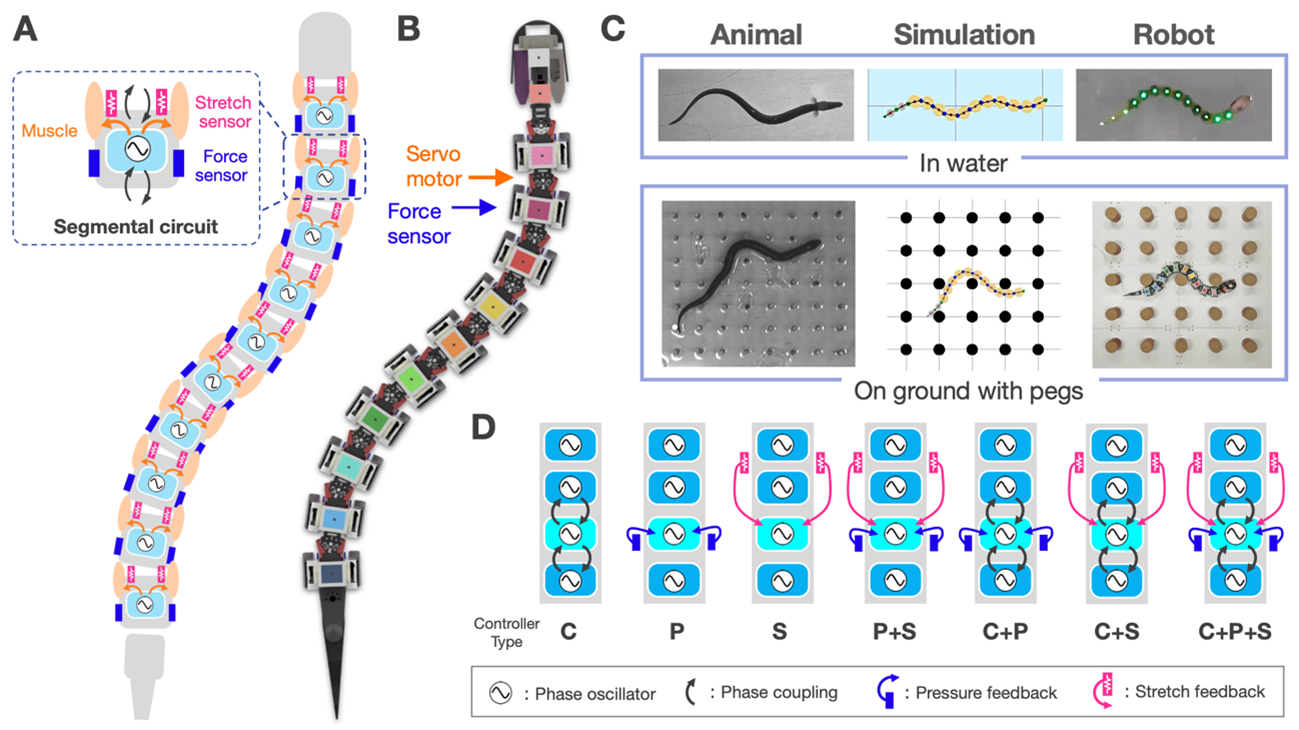
図1. 本研究の概要。(A) ウナギなどの細長い魚類を模した身体および神経回路のモデルの概観図。(B)開発したウナギ型ロボットのCADイメージ図。(C) 提案モデルが動物の運動を再現しうるかをシミュレーション実験やロボット実験を通じて検証するアプローチを本研究では採用。(D)検証に用いた多様な神経回路の構成。
【論文情報】
タイトル:Multisensory feedback makes swimming circuits robust against spinal transection and enables terrestrial crawling in elongate fish
著者:Kotaro Yasui*, Astha Gupta*, Qiyuan Fu, Shura Suzuki, Jeffrey Hainer, Laura Paez, Keegan Lutek, Jonathan Arreguit, Takeshi Kano, Emily M. Standen, Auke J. Ijspeert, Akio Ishiguro
*責任著者:東北大学学際科学フロンティア研究所 助教 安井浩太郎
*責任著者:スイス連邦工科大学ローザンヌ校 Astha Gupta (博士課程学生)
掲載誌:Proceedings of the National Academy of Sciences (PNAS)
DOI:10.1073/pnas.2422248122
問い合わせ先
(研究に関すること)
東北大学学際科学フロンティア研究所
助教 安井浩太郎
TEL: 022-217-5465
Email: kotaro.yasui.b8*tohoku.ac.jp
(*を@に置き換えてください)
東北大学電気通信研究所
教授 石黒章夫
TEL: 022-217-5464
Email: akio.ishiguro.b1*tohoku.ac.jp
(*を@に置き換えてください)
(報道に関すること)
東北大学学際科学フロンティア研究所
企画部
藤原 英明
TEL: 022-795-5259
Email: hideaki*fris.tohoku.ac.jp
(*を@に置き換えてください)
![]()
![]()
![]()
![]()
東北大学は持続可能な開発目標(SDGs)を支援しています