The research group of Professor Akio Ishiguro and Assistant Professor Dai Owaki of Tohoku University have, for the first time, successfully demonstrated that by changing only its parameter related to speed, a quadruped robot can spontaneously change its steps between energy-efficient patterns (gait transition phenomena).
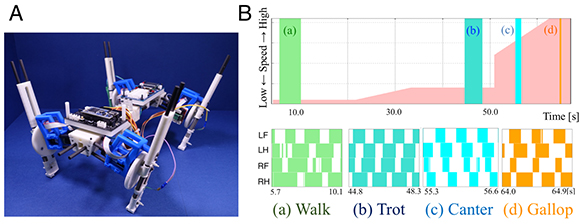
A The quadruped robot, Oscillex 3. B Reproduced changes in step (gait transition phenomenon). (Top) Change in the parameter related to speed (Bottom) The colors represent periods when a leg senses weight on the corresponding leg. The gait transition was demonstrated from walk to trot, to canter, to gallop.
Until now, the manner in which changing speeds cause quadrupeds to change their gaits - walking, trotting and galloping - is poorly understood. Through this study, the researchers successfully demonstrated the reproduction of the quadruped gait transition phenomena. They achieved this via a decentralized control scheme, using a simple local rule in which a leg continues to support the body while sensing weight on the corresponding leg.
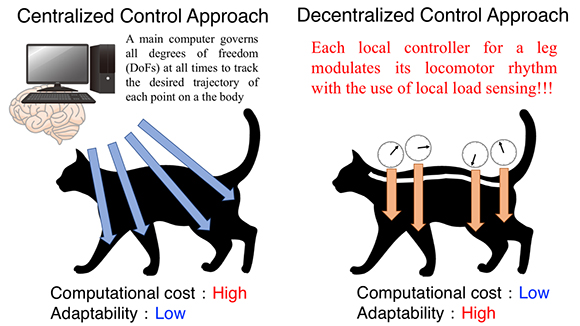
Centralized control approach: A main computer governs all degrees of freedom (DoFs) on the body at all times to track the desired trajectory of each point, resulting in high computational cost and low adaptability to environmental changes. Decentralized control approach: Each local controller for a leg modulates its locomotor rhythm with the use of only local load sensing, resulting in low computational cost and high adaptability.
Moreover, they confirmed that the energy-efficiency profile of the robot's gait patterns matched those measured in horses.
The present work is expected to lead to better understanding of the mechanism of how quadrupeds can flexibly and efficiently adjust their gait when their speed is changed. The result may constitute the basis of an unconventional approach to coordinating the many degrees of freedoms required for adaptive robot locomotion.
The researchers hope that the study will lead to a wide range of applications such as adaptive legged robots working in disaster areas, user-friendly legged entertainment robots, and automatic motion-creation algorithms for computer graphics (CG) animation.
Quadruped robot exhibits spontaneous changes in step with speed
- Publication Details:
Authors: Dai Owaki and Akio Ishiguro
Title: A Quadruped Robot Exhibiting Spontaneous Gait Transitions from Walking to Trotting to Galloping
Journal: Scientific Reports
DOI: 10.1038/s41598-017-00348-9
Contact:
Akio IshiguroResearch Institute of Electrical Communication
Email: ishiguro@riec.tohoku.ac.jp
Website: http://www.cmplx.riec.tohoku.ac.jp