
Tohoku University has been selected under Japan's Space Strategy Fund (SSF) to develop technologies that could enable the construction of future infrastructure on the Moon using locally available resources.
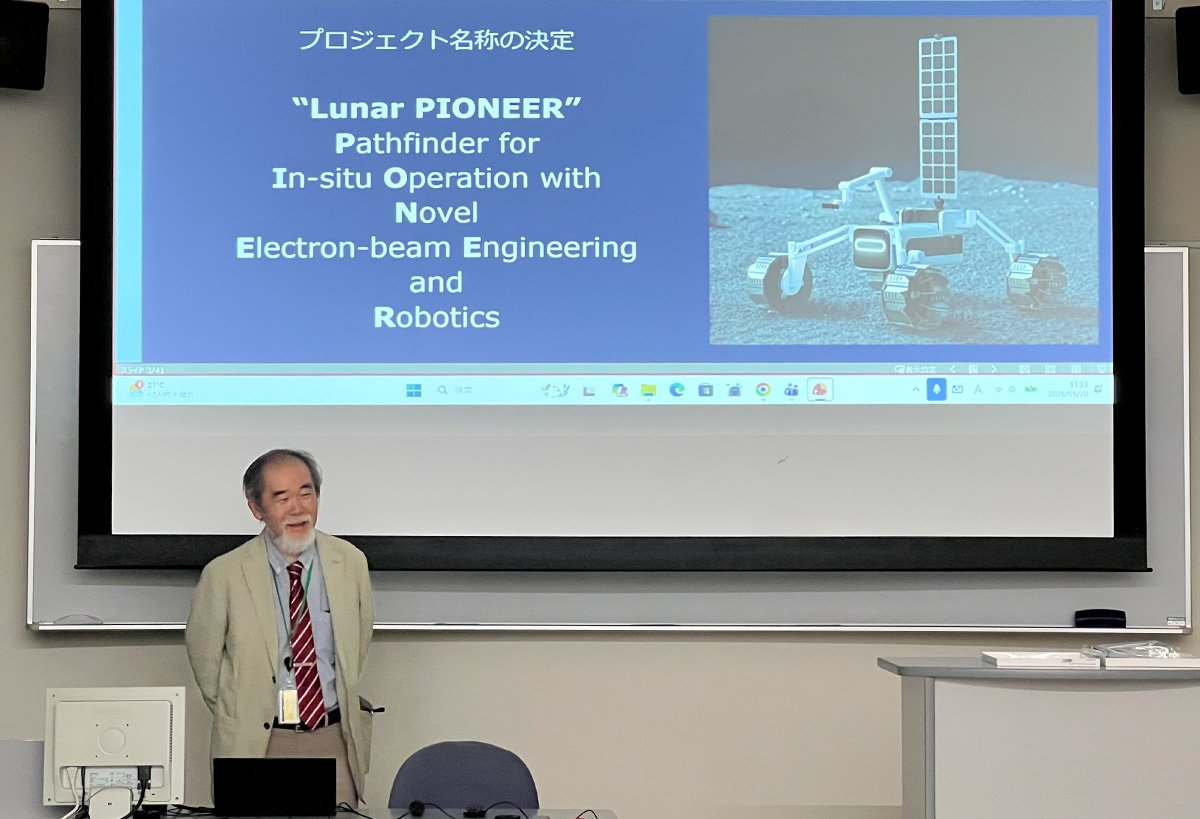
Selected under the "Elemental Technologies for Lunar Infrastructure Development" theme of Japan's Space Strategy Fund Programme (Phase II), the project is led by Kazuya Yoshida, long-time head of Tohoku University's Space Robotics Lab and currently a specially appointed professor at the New Industry Creation Hatchery Centre (NICHe).
The four-year grant for the Lunar PIONEER Project - which stands for "Pathfinder for In-situ Operations with Novel Electron-beam Engineering and Robotics" - was officially approved on March 30, 2026.
A kickoff meeting was subsequently held on May 20 at Tohoku University's Aobayama Campus, bringing together representatives from the university, five industry partners and the SSF programme office to discuss implementation plans and review preliminary progress.
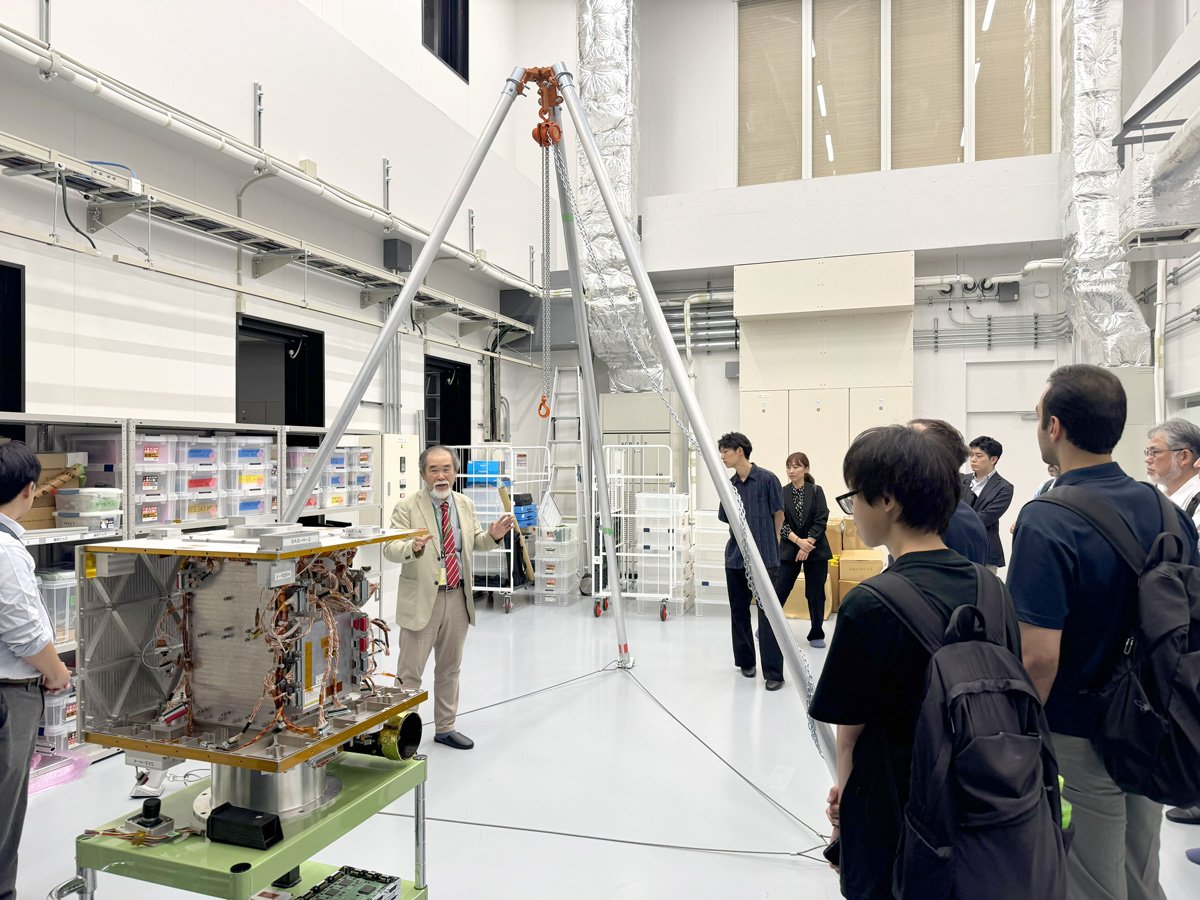
Attendees also toured the Space Robotics research facilities, where they were shown lunar robot models developed to date and the clean room used for spacecraft development.
As space agencies and private companies race to establish sustainable human outposts on the Moon, one challenge looms larger than almost any other: the staggering cost of transporting construction materials from Earth. The Lunar PIONEER Project aims to solve this problem by using the Moon's own surface soil, known as regolith, as a building material.

The project will develop robotic technology to melt and solidify lunar regolith using a high-powered electron beam, effectively transforming the dust and rock already covering the lunar surface into solid, usable construction materials - without a single brick needing to be launched from Earth.
"The robot will operate in the lunar south polar region, and the electron beam will melt a small portion of the surface to verify whether we can create a sufficiently strong and rigid structure from the lunar material," Yoshida explains. "If that succeeds, then in the future we can think about building infrastructure." The ultimate aim, he adds, is to construct landing pads and access roadways directly on the Moon using resources already available on the lunar surface.
To put this technology to work, the project will also develop a multifunctional mobile robot capable of carrying and operating electron-beam equipment across the lunar surface. "Creating construction material is the first step, but this technique is highly scalable if we succeed," says Yoshida.
The implications extend well beyond space exploration. Advances in autonomous robotics, remote operations and in-situ resource utilisation are likely to yield innovations applicable across industries, ranging from disaster response and deep-sea exploration, to infrastructure maintenance in hazardous environments.
For Yoshida, the Moon is only part of the story. "Of course, Mars is the next frontier. The Moon, whilst very challenging, serves as a stepping stone and a demonstration site. If we can confirm that the technology works there, then we want to go to Mars, where there is a much higher potential for long-term human expedition," he says.
Yoshida is no stranger to pushing the boundaries of space robotics. He previously served as technical leader for Team HAKUTO, Japan's sole representative in the Google Lunar XPRIZE, and more recently as project manager for "Moonshot R&D Goal 3," overseeing the MoonBot system - a reconfigurable, AI-driven modular robot demonstrated at full-scale lunar simulation facilities in Japan and Germany, and exhibited at World Expo 2025 in Osaka.

Yoshida and Tohoku University will lead the Lunar PIONEER Project alongside five private sector partners. Space Quarters Inc. will develop the core electron-beam and regolith processing technology, having already independently demonstrated a world first in this capability. Hakusan Corporation will design the mobile robot hardware; the Research Institute of Systems Planning Inc. will manage lunar communications technology; and JAOPS Inc. will develop the ground segment infrastructure for mission control. Asteria ART LLC will provide its simulation platform to enable rigorous virtual testing throughout development.
The project will also seek integration with a concurrent SSF initiative on high-precision lunar landing in polar regions, being developed by ispace Inc. Together, these efforts represent some of Japan's most significant contributions to the global push for sustainable habitation on the Moon - and beyond.

Links:
- Tohoku University Space Robotics Lab: https://astro2.mech.tohoku.ac.jp/en/
- Space Quarters Inc.: https://space-quarters.com
- Hakusan Corporation: https://www.hakusan.co.jp/english/research_and_development/hero_lab.html
- Research Institute of Systems Planning Inc.: https://www.isp.co.jp/
- JAOPS Inc.: https://www.jaops.com
- Asteria ART LLC: https://artefacts.com/
Contact:
Specially Appointed Professor Kazuya Yoshida
Tohoku University
New Industry Creation Hatchery Centre
Inquiries: https://x.gd/UXmgv